Advancing Autonomous Operations: From Outer to Inner Space
Ocean Sciences the world over is at a cusp, with a move from the Expeditionary to the Observatory mode of doing science. Recent policy decisions in the United States, are pushing the technology for persistent observation and sampling which hitherto had been either economically unrealistic or unrealizable due to technical constraints. With the advent of ocean observatories, a number of key technologies have however proven to be promising for sustained ocean presence. In this context robots will need to be contextually aware and respond rapidly to evolving phenomenon, especially in coastal waters due to the diversity of atmospheric, oceanographic and land-sea interactions not to mention the societal impact they have on coastal communities. They will need to respond by exhibiting scientific opportunism while being aware of their own limitations in the harsh oceanic environment. Current robotic platforms however have inherent limitations; pre-defined sequences of commands are used to determine what actions the robot will perform and when irrespective of the context. As a consequence not only can the robot not recover from unforeseen failure conditions, but they’re unable to significantly leverage their substantial onboard assets to enable scientific discovery.
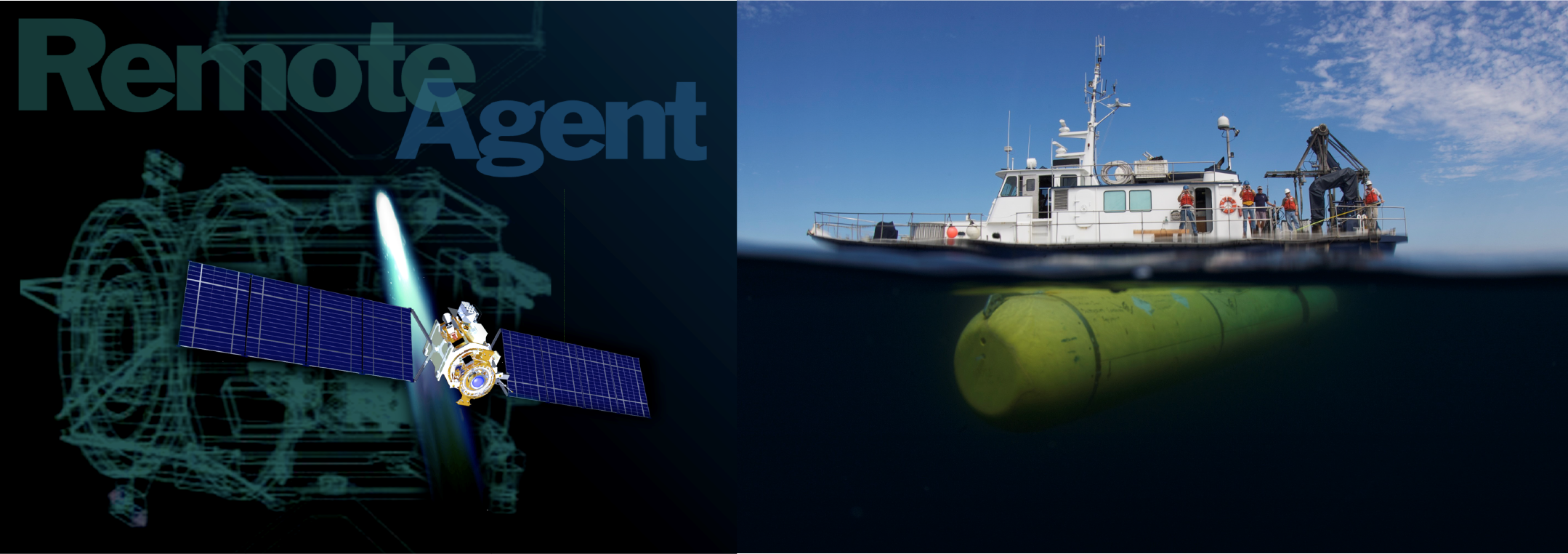
To mitigate such shortcomings, we have designed, built, tested and deployed deliberative techniques to dynamically command autonomous underwater vehicles (AUVs) with deep roots in work to command and control deep space probes for NASA. Our effort is aimed to use a blend of generative and deliberative Artificial Intelligence Planning and Execution techniques to shed goals, introspectively analyze onboard resources and recover from failures. In addition we are working on Machine Learning techniques to adaptively trigger science instruments that will contextually sample the seas driven by scientific intent. The end goal is towards unstructured exploration of the subsea environments that are a rich trove of problems for autonomous systems. Our approach spans domains and not unduly specific to the ocean domain; the developed system is being used for a terrestrial personal robot at a Silicon Valley startup and is being tested on a Planetary rover test bed by the European Space Agency. Our work is a continuum of efforts from research at NASA to command deep space probes and Mars rovers, the lessons of which we have factored into the oceanic domain. In this talk I will articulate the challenges of working in this hostile underwater domain, lay out the differences and motivate our architecture for goal-driven autonomy on AUV’s and more recently on unmanned aerial vehicles (UAVs) for dual-use exploration and surveillance.
Praça de Gomes Teixeira
4099-002 Porto
About the Grand Hall
Organized in collaboration with
![]()
